Research
* equal contribution ✉ corresponding author
Preprints
Publications
TacMan-Turbo: Proactive Tactile Control for Robust and Efficient Articulated Object Manipulation
A proactive tactile control framework for articulated object manipulation.
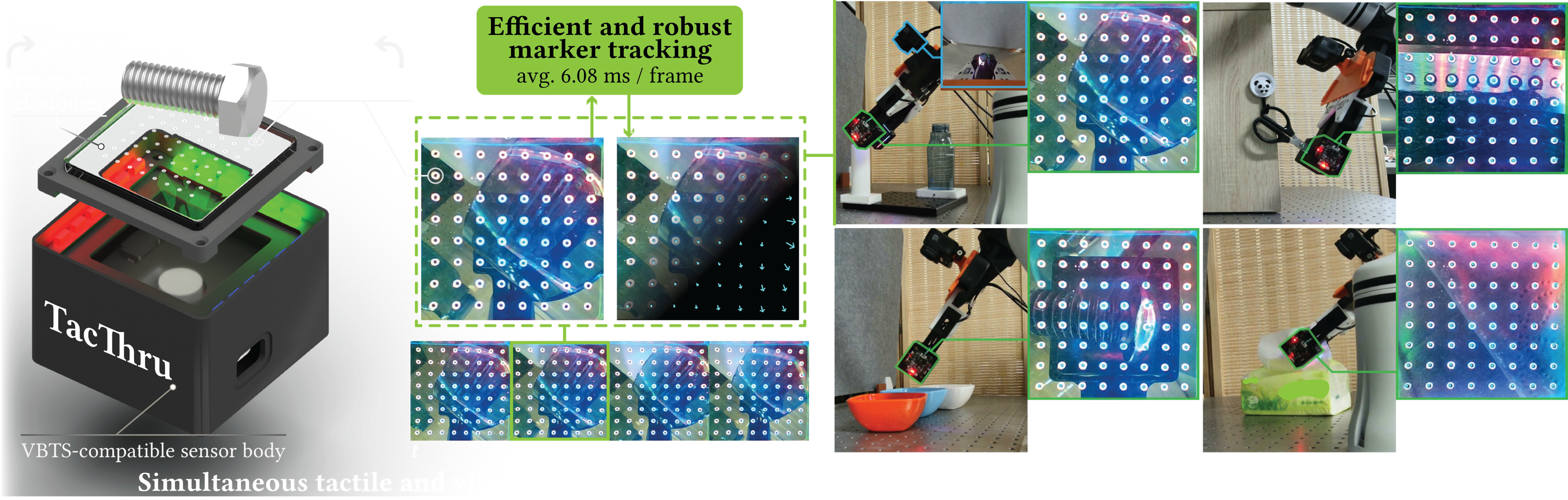
Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation
Taccel is a high-performance GPU-based simulator, combining ABD and IPC, for simulating robots with vision-based tactile sensors.


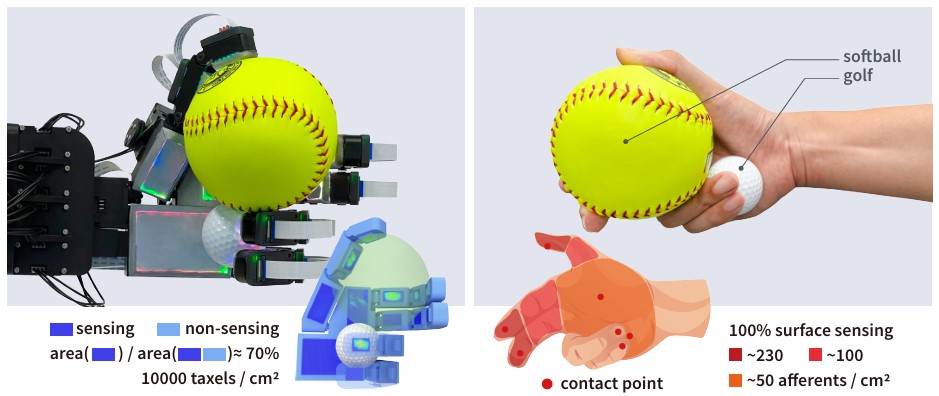
Embedding high-resolution touch across robotic hands enables adaptive human-like grasping
We design F-TAC Hand, a five-finger biomimetic hand featuring high-resolution tactile sensing across the hand. This design enables adaptive human-like grasping and unlocks more capabilities.